Учени от Държавния университет на Северна Каролина (North Carolina State University) развиват нов начин за създаване на меки роботи с много по-голяма гъвкавост на движенията. Екипът е използвал магнитни полета, за да контролира свързани във верига метални микрочастици, вградени в меки структури от еластичен полимер. Можем да движим дистанционно гъвкавите полимерни структури на меките роботи като контролираме магнитно поле, което манипулира веригите от магнитни частици в тях, казва Джо Трейси, доцент по Материалознание и инженерство от университета в Северна Каролина.

Но нека уточним какво всъщност представляват меките роботи. Изследванията и разработките в тази област са обособени в отделен клон на роботиката – Soft Robotics. Учени си инженери от различни университети и лаборатории по света се опитват да създават роботизирани (често автономни) конструкции от меки и деформируеми материали като силикон, пластмаса, плат, гума, плат или механични части като пружини. Меките роботи могат активно да си взаимодействат с околната среда, защото претърпяват големи деформации при движението си или постигат структурно съответствие с околни обекти поради тяхната мекота и други морфологични белези.

Меките роботи често, но не задължително, са вдъхновени от биологичните организми на околния свят (например октоподите). Те имат редица предимства пред твърдите роботи. Например, деформируемите структури играят важна роля за роботи, които трябва да се справят с несигурността при решаването на задачи в силно динамични среди. Например, придвижване в сложен, екстремен, непознат терен или хващане на неизвестни обекти. Безопасността също играе роля при използването на мек материал при проектирането на роботи – мекотата дава възможност за безопасен физически контакт с живи клетки или човешки органи. В допълнение, деформируемите материали и структури потенциално могат да съхраняват и да освобождават енергия, която е от полза за енергийно ефективно придвижване. Друго предимство на меките роботи е, че използваните материали са много по-евтини от металните части в твърдите конструкции, които използват въртящ момент или редуктори, за да извършват движение.
[ot-video type=“youtube“ url=“https://www.youtube.com/watch?v=8PV258_rZkQ“]
Недостатък на меките роботи е, че техните меки структури са трудни за моделиране и затова е трудно да бъдат контролирани контролира. Освен това, тъй като дисциплината Soft Robotics е доста млада, повечето от меките роботи са на етап прототип и все още трябва да бъде доказвано, че могат да бъдат полезни при реални условия или за индустриални приложения.

Досега разработките на меки роботи са свързани с използването на флуиди или газ, но използването на магнитно поле открива нови хоризонти – посоката на приложеното магнитно поле може да се използва, за да накара свързаните във верига метални микрочастици и заобикалящия ги полимер да се движат в същата посока.
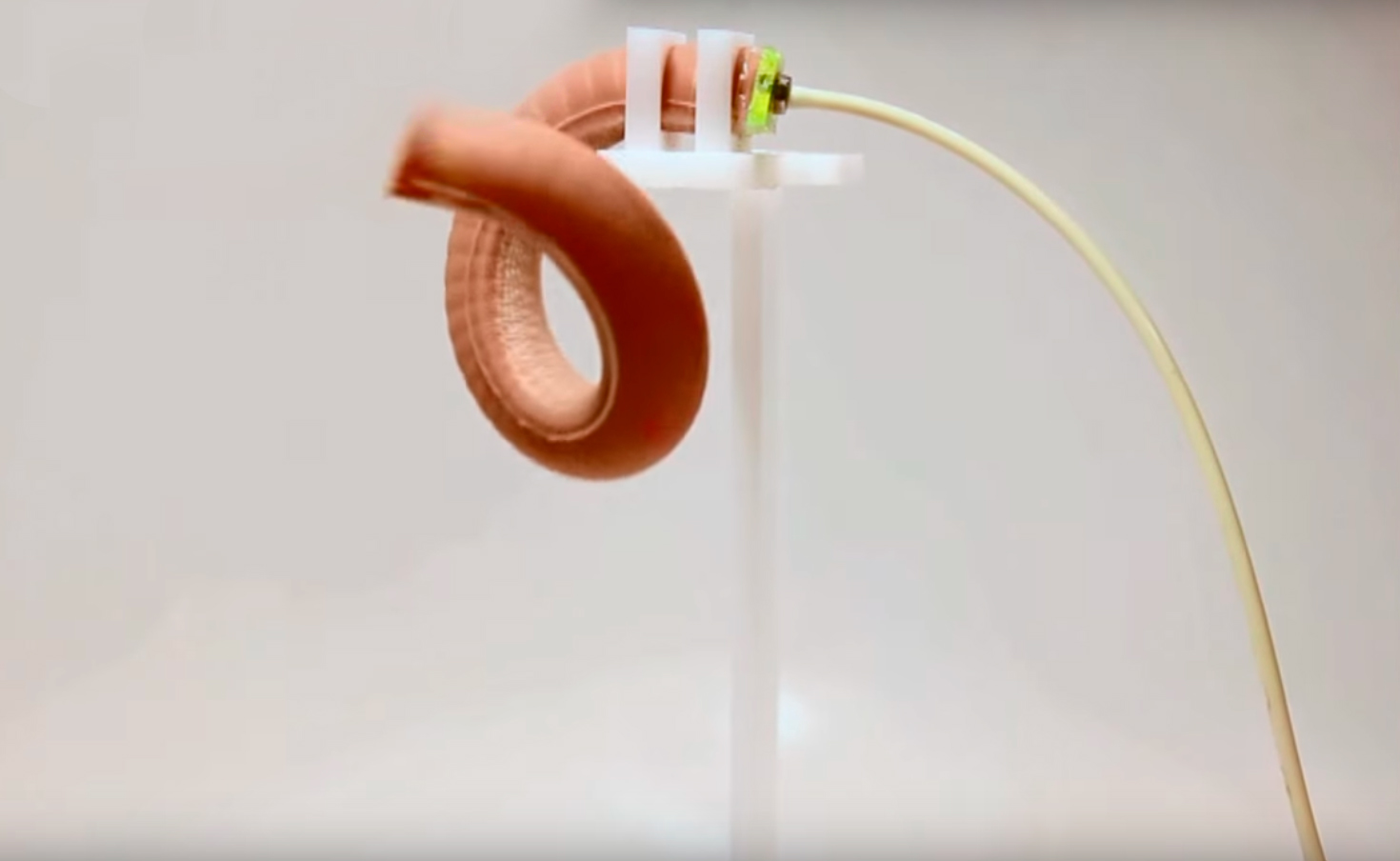
С помощта на тази техника, екипът от Държавния университет на Северна Каролина е успял да създаде три вида меки роботи.
[blockquote style=“4″]Едното устройство е конзолно и може да вдигне до 50 пъти собственото си тегло. Второто устройство е със структура на акордеон, която се разширява и свива, т.е. имитира поведението на мускулите. Третото устройство е една тръба, която е проектирана да функционира като перисталтична помпа (перисталтика е радиално-симетрична контракция на мускулите на червата, която се разпространява като вълна), коментират от екипа.[/blockquote]
[blockquote style=“4″]Имаме нужда от повече идеи за това какво можем да направим с разработките си, казва още Джо Трейси, ръководител на екипа. [/blockquote]
Вижте още видео:
[ot-video type=“youtube“ url=“https://www.youtube.com/watch?v=cyRNG87XYP8″]